
機器人視覺導引技術
給機器人插上智能的翅膀
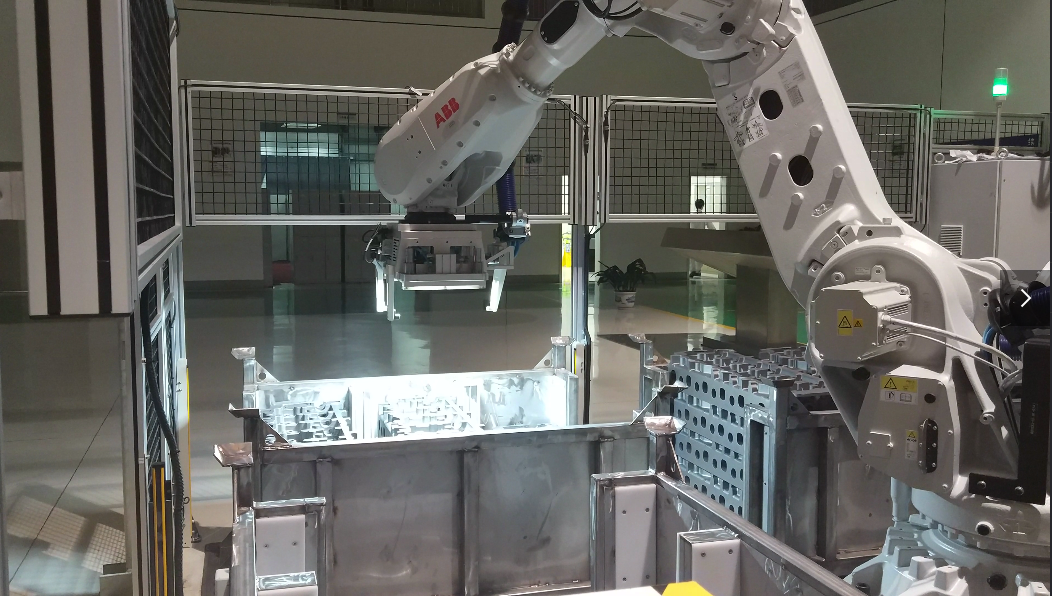
通過機器人技術與視覺檢測技術相結合,為機器人集成2D、3D機器視覺系統,機器人在生產過程中可自動識別目標工件位置,實現隨機擺放目標工件的定位、檢測、模型匹配、精確抓取與機器人自動上下料。

機器人智能銑削技術
國家自然科學基金重點項目
將復雜曲面加工理論成果應用于機器人銑削加工,開展大型航空結構件的非接觸在線測量、機器人銑削加工工藝優化等技術研究,研制機器人智能銑削裝備,實現機器人銑削在航空、航天、航海等高端制造領域的產業化應用。
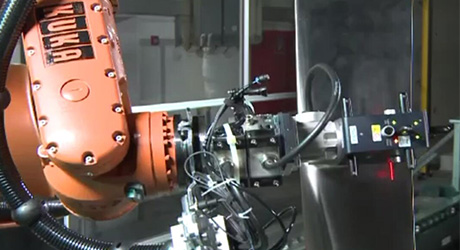
機器人參數標定技術
個性化標定,讓機器人更精準更智能
基于激光跟蹤儀、視覺檢測系統等測量儀器,通過對工業機器人進行工業機器人基坐標系、連桿參數、工件坐標系(刀具)的參數標定,從而提高機器人特定工作區域內的絕對定位精度和加工精度。
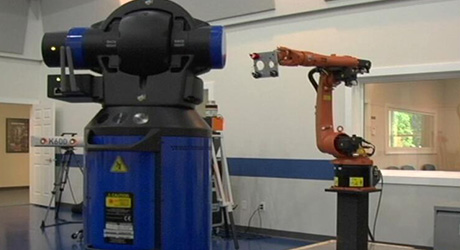
機器人非接觸測量技術
空間大,自由度高,精度高
將六維激光掃描技術與機器人技術相結合,可在復雜的現場和空間對被測大型工件進行快速掃描測量,直接獲得激光點所接觸的物體表面的三維坐標、色彩信息和反射強度——點云數據,點云數據經過計算機處理后,結和CAD模型可快速重構出被測物體的三維模型及線、面體、空間等各種制圖數據。